YOLO11 with TensorRT on Jetson Orin Nano
2025.07.26
はじめに
こちらの記事に従い、Jetson Orin Nanoをセットアップします。今回この記事では、NVIDIA Jetson Linux 36.4.4 を使用しJetson OrinNanoをセットアップしました。
https://docs.ultralytics.com/ja/guides/nvidia-jetson を参考にしています。
なお以下の作業はすべてJetson Orin Nano上で行います。
nvidia dockerのインストール
sudo apt update
sudo apt install -y nvidia-container curl
curl https://get.docker.com | sh
sudo usermod -aG docker $USERここまで実施したら一度再起動します
sudo rebootdockerコマンドが正しく動作するか確認します。
$ docker run --rm hello-world
Unable to find image 'hello-world:latest' locally
latest: Pulling from library/hello-world
c9c5fd25a1bd: Pull complete
Digest: sha256:ec153840d1e635ac434fab5e377081f17e0e15afab27beb3f726c3265039cfff
Status: Downloaded newer image for hello-world:latest
Hello from Docker!
...dockerコマンドに失敗する場合、https://bone.jp/articles/2025/250314_docker_raw_table の記事を参照してください。なお、最新のJetPackではこの問題が解消されているようです。
yolo11s.pt と yolo11s.engine の作成
dockerコンテナで yolo11s.pt とTensorRT用の yolo11s.engine を取得します。
mkdir -p data
docker run -it --ipc=host --runtime=nvidia -v $(pwd)/data:/data ultralytics/ultralytics:latest-jetson-jetpack6dockerインスタンスで以下を実行します。
yolo export model=yolo11s.pt format=engine half=True
cp yolo11s.pt yolo11s.engine /data一度dockerインスタンスを終了させます。
exityolo11s.pt と yolo11s.engine の速度比較
以下のスクリプト pred.py を /data に配置します。
import time
import cv2
from ultralytics import YOLO
def draw_results(frame, results, names):
for result in results:
boxes = result.boxes
if boxes is not None:
for box in boxes:
x1, y1, x2, y2 = box.xyxy[0].cpu().numpy().astype(int)
confidence = box.conf[0].cpu().numpy()
class_id = int(box.cls[0].cpu().numpy())
class_name = (
names[class_id] if class_id = 1.0: # show fps every second
fps = fps_counter / elapsed_time
fps_counter = 0
start_time = time.time()
fps_text = f"FPS: {fps:.1f}"
cv2.putText(
frame, fps_text, (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2
)
# print(fps_text)
cv2.imshow(f"{dev}", frame)
key = cv2.waitKey(1) & 0xFF
if key == ord("q"):
print("quit")
break
cap.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
import argparse
parser = argparse.ArgumentParser()
parser.add_argument("--dev", type=int, default=0, help="Camera device index")
parser.add_argument(
"--model",
type=str,
default="yolo11n.pt",
help="Path to the YOLO model (default: yolo11n.pt)",
)
args = parser.parse_args()
main(args.dev, args.model)Jetson Orin NanoのUSBにwebカメラを接続し以下のコマンドでdockerインスタンスを起動させます。
xhost +local:
docker run -it --rm \
--device=/dev/video0:/dev/video0:mrw \
-e DISPLAY=$DISPLAY \
-v /tmp/.X11-unix/:/tmp/.X11-unix \
--ipc=host \
-v $(pwd)/data:/data \
--runtime=nvidia \
ultralytics/ultralytics:latest-jetson-jetpack6dockerインスタンスで以下を実行します。
apt update
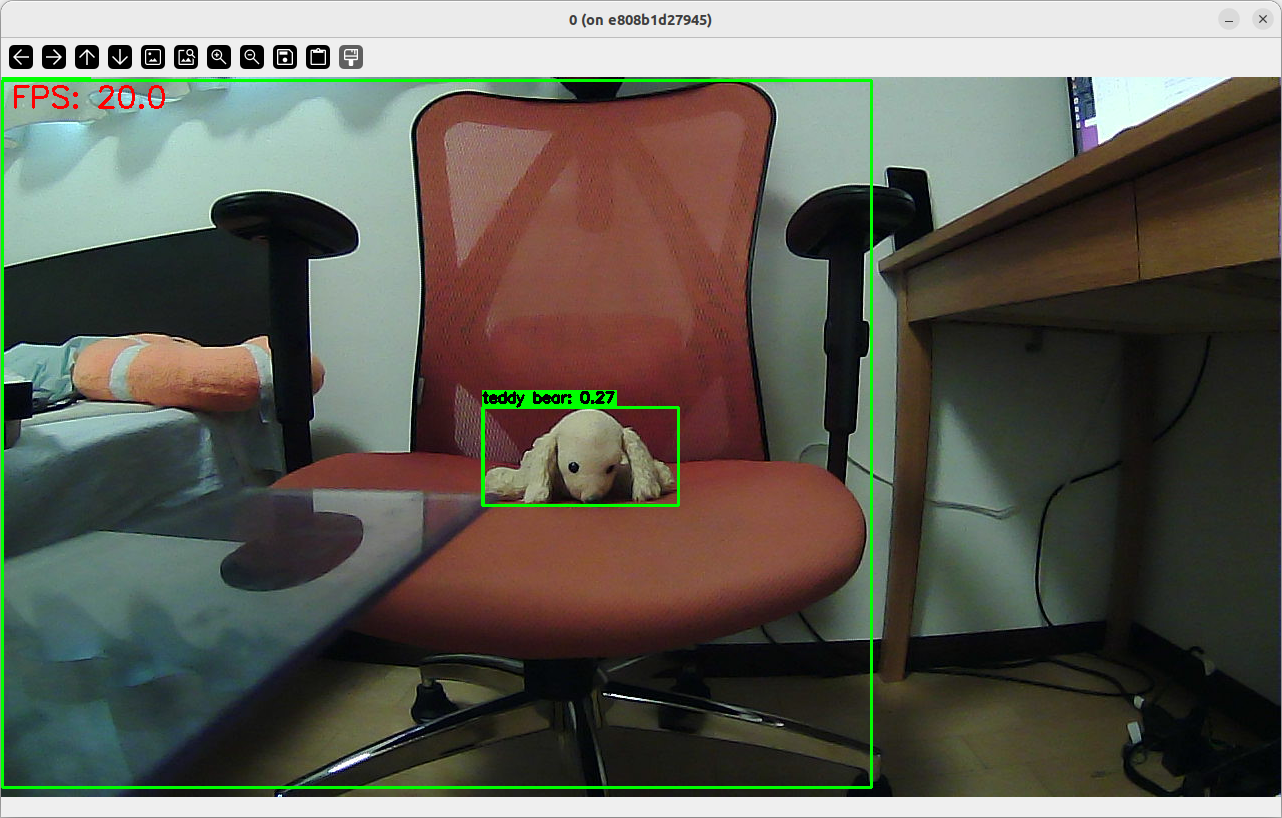
apt install libice6 libsm6yolo11s.pt の速度を見てみます。
python /data/pred.py --dev 0 --model /data/yolo11s.pt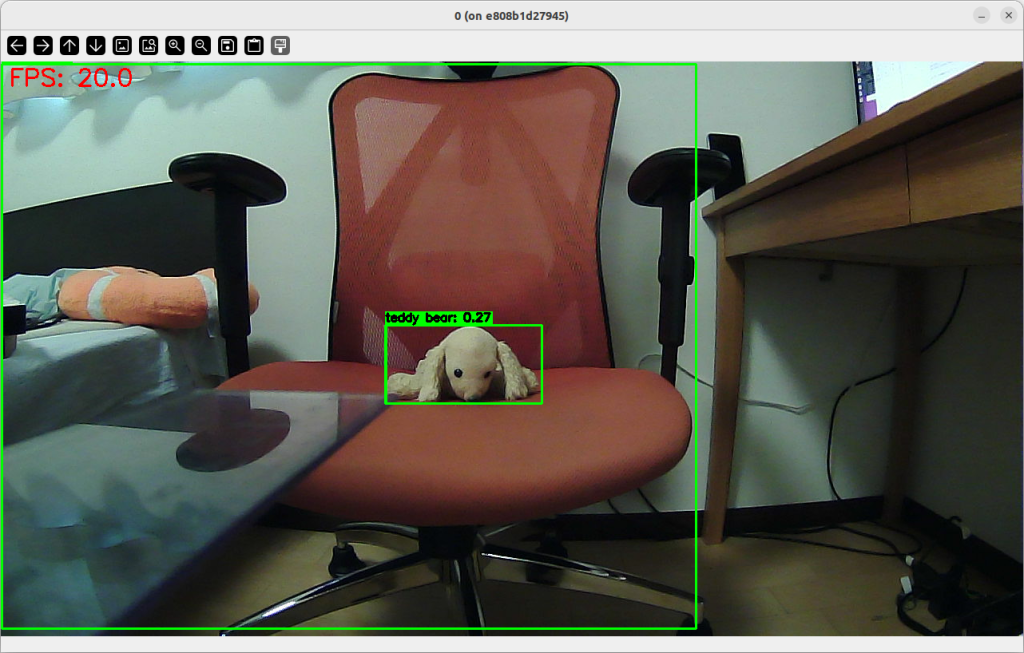
20fps程度でした。
つづいて、yolo11s.engine の速度を見てみます。
python /data/pred.py --dev 0 --model /data/yolo11s.engine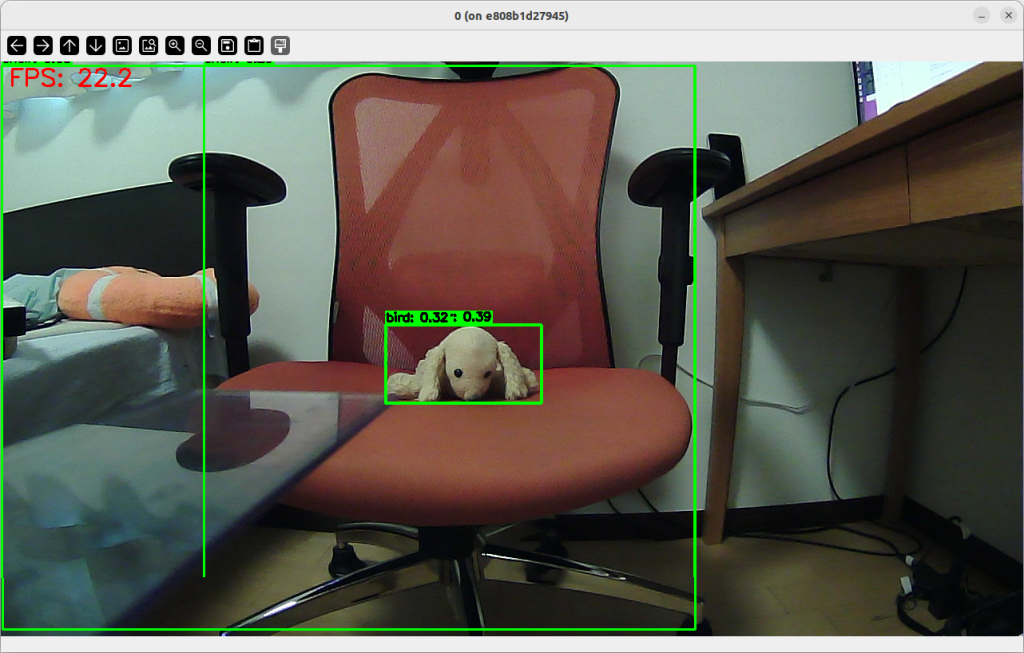
22fps程度でした。
training memo
学習はdockerコンテナに /dataset をマウントし以下を実行します。特に Jetson Orin Nanoではbatch=4 を指定します。
yolo detect train data=/dataset/my-config.yaml model=yolo11s.pt batch=4以上です!
$ cat dataset/config.yaml
mode: train
data: /dataset/tiles-docker.yaml
model: yolo11s.pt
epochs: 1000
batch: 4
degrees: 180.0
translate: 0.1
scale: 0.5
shear: 5.0
perspective: 0.0005
flipud: 0.0
fliplr: 0.0
project: /run
$ docker run -it --rm -v $(pwd)/run:/run -v $(pwd)/dataset:/dataset--ipc host --runtime nvidia ultralytics/ultralytics:latest-jetson-jetpack6
# yolo detect train cfg=/dataset/config.yaml model=/run/train5/weights/best.pt NVIDIA ジェットソン NVIDIA JetsonデバイスへのUltralytics YOLO11 、詳細なガイドをご覧ください。性能ベンチマークを調べ、AI機能を最大限に活用しましょう。
NVIDIA ジェットソン NVIDIA JetsonデバイスへのUltralytics YOLO11 、詳細なガイドをご覧ください。性能ベンチマークを調べ、AI機能を最大限に活用しましょう。  docker 28.0.1がJetson Linuxなどでiptables failedする(OSアップデートで解決) docker-ceの28.0.0へ更新でJetson Linuxなどで不具合が出ました。28.0.1でもカーネルモジュールiptable_rawへの依存があり不具合が続いています。28.0.2ではdocker.serviceの環境変数追加で緩和されます。Jetson Linux 36.4.4へのアップデートで最終解決し…
docker 28.0.1がJetson Linuxなどでiptables failedする(OSアップデートで解決) docker-ceの28.0.0へ更新でJetson Linuxなどで不具合が出ました。28.0.1でもカーネルモジュールiptable_rawへの依存があり不具合が続いています。28.0.2ではdocker.serviceの環境変数追加で緩和されます。Jetson Linux 36.4.4へのアップデートで最終解決し…